



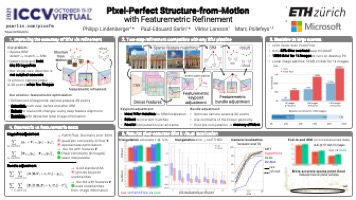
TLDR: This paper introduces a framework that improves the accuracy of Structure-from-Motion by refining keypoints, camera poses, and 3D points using the direct alignment of deep features. This enables accurate reconstruction at scale in challenging conditions.

Abstract
Finding local features that are repeatable across multiple views is a cornerstone of sparse 3D reconstruction. The classical image matching paradigm detects keypoints per-image once and for all, which can yield poorly-localized features and propagate large errors to the final geometry. In this paper, we refine two key steps of structure-from-motion by a direct alignment of low-level image information from multiple views: we first adjust the initial keypoint locations prior to any geometric estimation, and subsequently refine points and camera poses as a post-processing. This refinement is robust to large detection noise and appearance changes, as it optimizes a featuremetric error based on dense features predicted by a neural network. This significantly improves the accuracy of camera poses and scene geometry for a wide range of keypoint detectors, challenging viewing conditions, and off-the-shelf deep features. Our system easily scales to large image collections, enabling pixel-perfect crowd-sourced localization at scale.

The featuremetric refinement can supercharge any global or incremental SfM pipeline that is based on sparse local features.
BibTeX Citation
@inproceedings{lindenberger2021pixsfm,
author = {Philipp Lindenberger and
Paul-Edouard Sarlin and
Viktor Larsson and
Marc Pollefeys},
title = {{Pixel-Perfect Structure-from-Motion with Featuremetric Refinement}},
booktitle = {ICCV},
year = {2021},
}